Terrapin is a friendly robot turtle whose shell is a terrarium for a plant. It is charged with taking care of this plant by moving into and out of the light. The project was inspired by Nemo's Garden where plants are being grown underwater in huge domes called biospheres. The domes reminded me of turtle shells, and we thought, why not make a land version?
Our team of 5 worked for a semester to design a successful system, integrating both mechanical, electrical, and software components as part of our Principles of Engineering course.
I worked primarily on the mechanical system, designing and fabricating the turtle, as well as documenting our progress. Please check out our website for more documentation!
Terrapin
Process
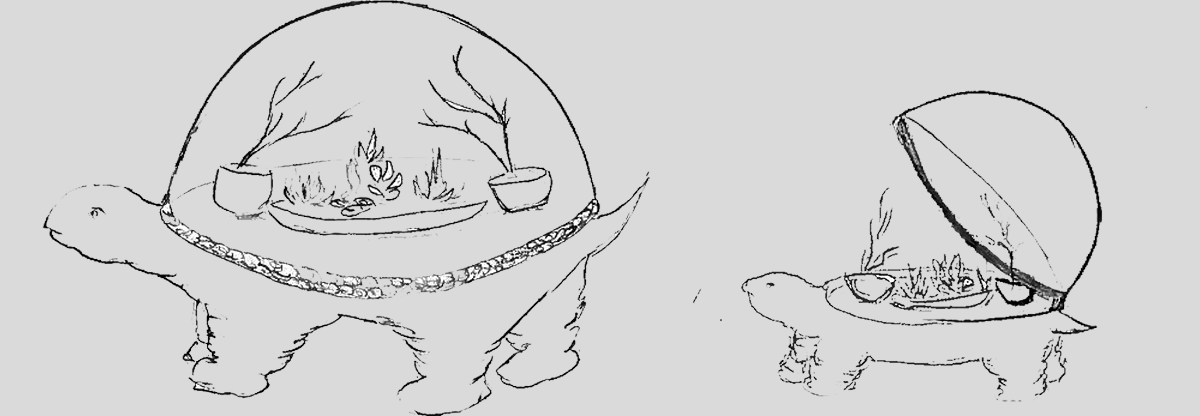
Concept art of a turtle terrarium that would take care of the plant inside of its shell.
Video of our first prototype, responding to shade by moving into the light.
A CAD of the first prototype of the turtle's legs.

The Allbot VR408's leg configuration served as inspiration for our first turtle legs.
First iteration of a crawling motion of the turtle. Although it inches itself forward, much of the progress is lost when it ends up pushing itself back.

Completed CAD of the system. Although we wanted to add back legs, we decided to focus on the motion instead and use caster wheels in the back.
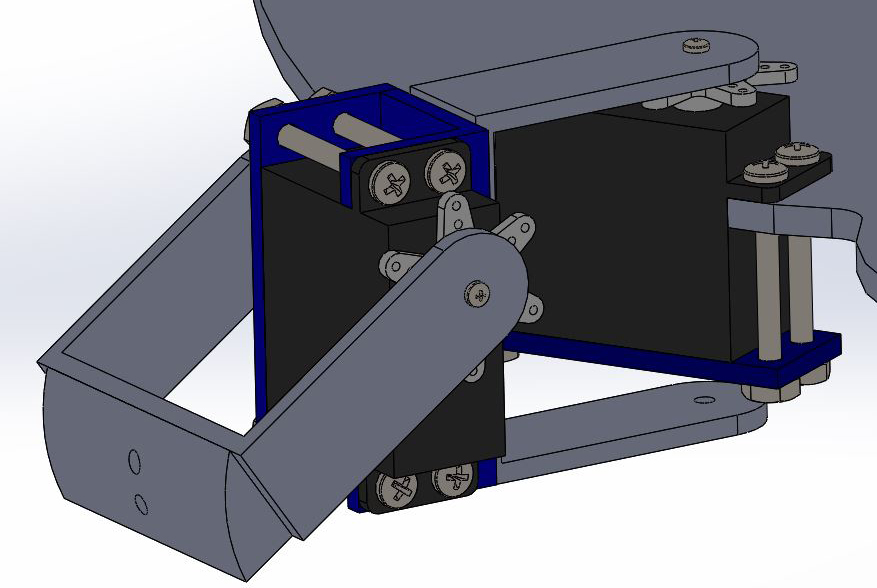
A Klann linkage coupled with a servo gives us the 3 degrees of freedom necessary for a convincing and reliable leg motion.
The second iteration included increased weight on the front legs, friction on the feet, and reinforced linkages that were properly restrained to improve the motion.

We vacuum formed the dome out of thin plastic over a machined foam mold.

The turtle in the final stages of its assembly. The body, head, and tail were 3D printed, covered in epoxy, and spray painted.